自动驾驶和人工智能机器人依靠计算机视觉、激光雷达和雷达等主要技术来观测周围环境。虽然计算机视觉、激光雷达和雷达可用于实现相同的目的,但它们是不同的技术,具有各自的优势。在本篇中,我们将了解计算机视觉、激光雷达、雷达以及训练人工智能系统所需的数据标注之间的区别。
什么是计算机视觉?

计算机视觉是人工智能 (AI) 的一个领域,它使计算机和系统能够从数字图像、视频和其他视觉输入中获取有意义的信息,并根据该信息采取行动或提出建议。如果人工智能使计算机能够思考,那么计算机视觉使它们能够看到、观察和理解。基本上,计算机视觉的工作方式与人类视觉相同,只不过我们的视觉在我们的一生中接受过训练:如何区分物体、它们有多远、它们是否在移动以及是否有故障问题。
计算机视觉不具备这个优势,这就是为什么它需要大量带注释的训练数据集来理解物理世界。它一遍又一遍地对数据进行分析,直到辨别出差异并最终识别出图像。例如,我们最近帮助一位客户训练计算机视觉系统来识别汽车是否损坏,我们需要标注超过 36,000 张图像来训练他们的计算机视觉系统。
计算机视觉技术是一个快速发展的领域,正在积极应用于汽车、农业、建筑、安全和其他行业。
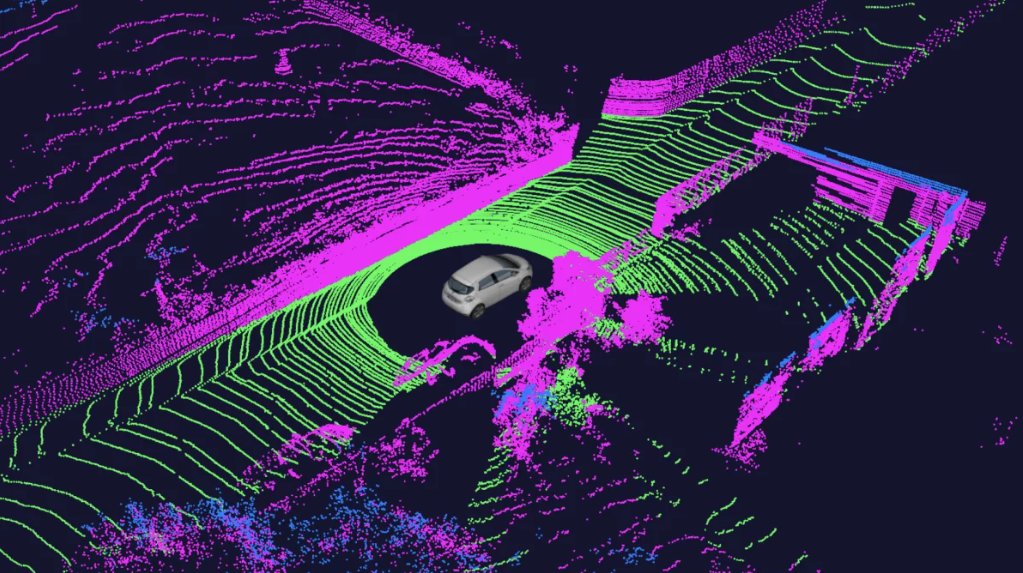
什么是激光雷达?
什么是雷达?

发射器发射无线电波,这些无线电波被目标反射并被接收器检测到,接收器通常与发射器位于同一位置。
尽管返回的无线电信号通常非常微弱,但无线电信号很容易被放大,因此雷达可以检测到其他发射(例如声音或可见光)太弱而无法检测到的范围内的物体。
计算机视觉、激光雷达和雷达有什么区别?
选择使用 LiDAR 计算机视觉还是雷达将取决于每个项目的要求和规格。
下面列出的差异应该可以提供对差异的高层次理解:
操作差异
计算机视觉是人工智能的一部分,人类使用基于神经网络、机器学习和深度学习方法的人工智能来教计算机解释和理解数字图像或视频。
激光雷达发出光脉冲对地球表面进行采样,以产生高精度的测量结果。雷达使用无线电波来确定物体的位置、接近度和速度。
技术差异
计算机视觉使用图像和视频来理解现实世界场景,以创建 3D 地图,使自动驾驶汽车能够识别、分类和检测不同的物体。激光雷达使用紫外线脉冲来检测周围的物体。雷达依赖于可以放大的无线电波,从而使雷达能够检测激光雷达和计算机视觉可能看不到的物体。
物体识别
激光雷达使用每秒发出数百万个脉冲的激光,照射并撞击物体并反射回来,从而提供出色的距离信息。
因此,距离测量和深度感知比相机更好。雷达的工作原理与此类似,只不过它使用无线电波而不是光波。
它发射无线电信号的短脉冲,并测量反射返回所需的时间。计算机视觉依赖于数据注释过程中进行的训练来识别对象。它以与人类相同的方式看待每个物体,并根据特定特征识别它们。